Next: 4.3 Adjoint Up: 4 SO(2): Rotations in Previous: 4.1 Representation
The exponential map that takes skew symmetric matrices to rotation matrices is simply the matrix exponential over a linear combination of the generators:
 |
(95) | ||
 |
(96) | ||
 |
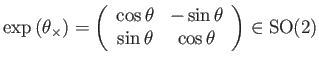
(97) |
The resulting elements form the Taylor series expansion of
![]() and
and
![]() :
:
 |
(98) |
Thus the exponential map yields a rotation by ![]() radians.
radians.
The exponential map can be inverted, going from
![]() to
to
![]() :
:
Ethan Eade 2012-02-16