Next: 5.2 Exponential Map Up: 5 SE(2): Rigid transformations Previous: 5 SE(2): Rigid transformations
The group of rigid transformations in 2D space,
![]() ,
is represented by linear transformations on homogeneous three-vectors:
,
is represented by linear transformations on homogeneous three-vectors:
| (101) | |||
 |
(102) |
Note that, in an implementation, only
![]() and
and
![]() need to be stored. The remaining matrix structure can remain implicit.
need to be stored. The remaining matrix structure can remain implicit.
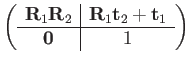
Transformation composition and inversion are coincident with matrix multiplication and inversion:
| (103) | |||
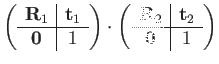 |
(104) | ||
 |
(105) | ||
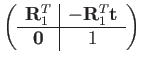 |
(106) |
The matrix representation also makes the group action on 2D points and vectors explicit:
 |
(107) | ||
 |
(108) |
Typically, ![]() , so that
, so that
![]() is a Cartesian point. The
action by matrix-vector multiplication corresponds to first rotating
is a Cartesian point. The
action by matrix-vector multiplication corresponds to first rotating
![]() and then translating it. For direction vectors, encoded
with
and then translating it. For direction vectors, encoded
with ![]() translation is ignored.
translation is ignored.
The Lie algebra
![]() is the set of
is the set of ![]() matrices
corresponding to differential translations and rotation around the
identity. There are thus three generators of the algebra:
matrices
corresponding to differential translations and rotation around the
identity. There are thus three generators of the algebra:
An element of
![]() is then represented by linear combinations
of the generators:
is then represented by linear combinations
of the generators:
| (110) | |||
| (111) |
For convenience, we write
![]() , with multiplication against the generators implied.
, with multiplication against the generators implied.
