Next: 3.2 Exponential Map Up: 3 SE(3): Rigid transformations Previous: 3 SE(3): Rigid transformations
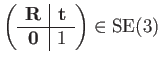
The group of rigid transformations in 3D space,
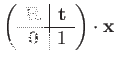
![]() ,
is well represented by linear transformations on homogeneous four-vectors:
,
is well represented by linear transformations on homogeneous four-vectors:
| (50) | |||
 |
(51) |
Note that, in an implementation, only
![]() and
and
![]() need to be stored. The remaining matrix structure can be implicitly
imposed.
need to be stored. The remaining matrix structure can be implicitly
imposed.
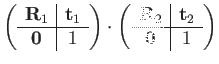
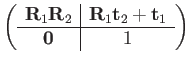
This representation, as in
![]() , means that transformation
composition and inversion are coincident with matrix multiplication
and inversion:
, means that transformation
composition and inversion are coincident with matrix multiplication
and inversion:
| (52) | |||
 |
(53) | ||
 |
(54) | ||
 |
(55) |
The matrix representation also makes the group action on 3D points and vectors clear:
 |
(56) | ||
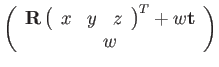 |
(57) |
Typically, ![]() , so that
, so that
![]() is a Cartesian point. The
action by matrix-vector multiplication corresponds to first rotating
is a Cartesian point. The
action by matrix-vector multiplication corresponds to first rotating
![]() and then translating it. For direction vectors, encoded
with
and then translating it. For direction vectors, encoded
with ![]() translation is ignored.
translation is ignored.
The Lie algebra
![]() is the set of
is the set of ![]() matrices
corresponding to differential translations and rotations (as in
matrices
corresponding to differential translations and rotations (as in
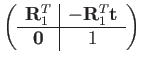
![]() ).
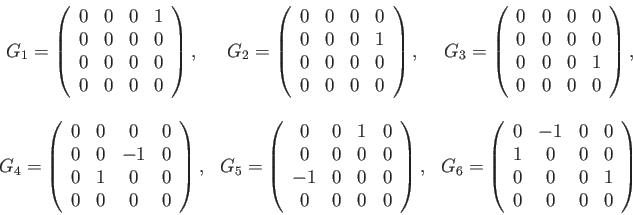
There are thus six generators of the algebra:
).
There are thus six generators of the algebra:
An element of
![]() is then represented by multiples of
the generators:
is then represented by multiples of
the generators:
| (59) | |||
| (60) |
For convenience, we write
![]() , with multiplication against the generators implied.
, with multiplication against the generators implied.